Especificaciones del servicio de Mapeo de Zona Quemada (BAM)
Descripción del servicio
El servicio de Mapeo de Zona Quemada (Burned Area Mapping, BAM) opera en dos etapas complementarias para apoyar la detección y vigilancia de incendios forestales. En primer lugar, los usuarios reciben información en tiempo real sobre los focos de incendios activos detectados mediante los datos térmicos de Sentinel-3 SLSTR que se ingieren de forma automática desde el Ecosistema Espacial de Datos de Copernicus (Copernicus Data Space Ecosystem, CDSE). Esta capacidad de detección temprana proporciona una visión casi instantánea de la actividad del fuego, lo que permite un rápido conocimiento de la situación y una respuesta inicial. Cuando se detecta una densidad significativa de puntos calientes, el sistema activa automáticamente la ingestión de imágenes ópticas corregidas atmosféricamente (Sentinel-2 MSI L2A) adquiridas antes y después de los incendios activos en curso. Tras la calibración de los datos de Sentinel-2, el sistema activa el algoritmo de cartografía de zonas quemadas, que proporciona la probabilidad, extensión y gravedad de las zonas quemadas con una resolución espacial de 10 m y una frecuencia de 5 días. Al concentrar los recursos computacionales únicamente en las áreas marcadas como significativas, este enfoque sistemático permite cartografiar eficazmente las zonas afectadas por los incendios, ofreciendo a los usuarios productos geoespaciales para evaluar el impacto de los incendios forestales y orientar la toma de decisiones.

En la Plataforma Copernicus LAC, el flujo de trabajo requiere como entrada una fecha a partir de la cual se iniciará el monitoreo (por ejemplo, el 1 de febrero de 2025) y un Área de Interés (AOI) (por ejemplo, todo el territorio colombiano).
A continuación, un componente de calendario de la cadena de procesamiento (es decir, una función de la cadena de procesamiento que se encarga de la programación y la automatización basadas en el tiempo) busca e ingiere periódicamente Datos EO de la colección Sentinel-3 SLSTR L1B del CDSE. La plataforma recoge estos datos mediante API o acceso directo a los catálogos. La ingesta y calibración de Sentinel-3 SLSTR se realiza de forma continua a escala continental en una amplia zona de interés definida dentro de la región de ALC.
Para cada conjunto de datos calibrados de Sentinel-3 SLSTR disponibles en el catálogo se activa el procesador de detección de puntos calientes. Los puntos calientes se agregan utilizando un filtro espacial para identificar grupos significativos de puntos calientes agregados. A continuación, cada grupo se utiliza para identificar las zonas con incendios en toda la región de interés. Un área con incendios consiste en la tierra cubierta por una huella de mosaico de Sentinel-2 que interseca grupos de puntos calientes agregados. En esta zona, el sistema activa automáticamente la ingesta de datos Sentinel-2 L2A anteriores y posteriores al evento. En particular, la Plataforma Copernicus LAC es capaz de ingerir y calibrar todas las adquisiciones S2 L2A disponibles en un periodo temporal configurable antes del primer punto caliente visto sobre la huella y después del último registrado. El mismo componente también busca puntos calientes VIIRS S-NPP desde el servicio FIRMS de la NASA dentro del área del mosaico Sentinel-2.
Una vez realizado el preprocesado de todos los datos Sentinel-2 y VIIRS necesarios, el sistema activa automáticamente el módulo de cartografía de zonas quemadas. Este módulo emplea una versión adaptada del algoritmo FireCCISFD20 (Roteta et al, 2021)1, sustituyendo la imagen previa al incendio por un compuesto multitemporal para mitigar los efectos de la nubosidad persistente. Se han realizado ajustes adicionales para adaptar la cadena de procesamiento al marco de ejecución del servicio y a la configuración de los servidores. En cada sobrepaso del satélite Sentinel-2, el algoritmo BAM delimita las zonas quemadas utilizando múltiples índices espectrales basados en valores de reflectancia SWIR y NIR (los índices empleados se describen en la sección sobre el flujo de trabajo). Además, el algoritmo utiliza puntos calientes VIIRS S-NPP como información auxiliar para confirmar las áreas quemadas a partir de los índices espectrales. A partir de esta etapa, se aplica un enfoque basado en estadísticas de quemado inicial para extraer la probabilidad de área quemada. Una umbralización y binarización de la probabilidad produce la extensión del área quemada, y sobre esta delineación se calcula la severidad del área quemada, usando el Relativized Burn Ratio (RBR) de Parks et al., 20142.
El servicio BAM genera en la salida puntos calientes a partir de los datos de Sentinel-3 SLSTR, y mapas de zonas quemadas (probabilidad, extensión y gravedad) a partir de los datos de Sentinel-2..
Nota
Servicio de Mapeo de Zona Quemada (BAM)
Frecuencia: Diariamente para los puntos calientes y 5 días para los mapas de zonas quemadas.
Cobertura espacial: Dependiendo de la disponibilidad de recursos, el área de interés será seleccionada con el usuario final. El sistema es potencialmente extensible a toda la región LAC.
Cobertura temporal: La ingestión de Sentinel-2 se detiene cuando ya no se detectan más puntos calientes. El modo de monitoreo estará disponible en una versión demo por al menos 3 meses consecutivos. Para la fase operativa, la cobertura temporal de dicho monitoreo aún está por definirse.
Restricciones: Disponibilidad de productos de observación de la Tierra de los proveedores de datos (CDSE y servicio NASA FIRMS).
Diagrama de flujo
El esquema mostrado en esta sección describe el flujo de trabajo de alto nivel del servicio BAM
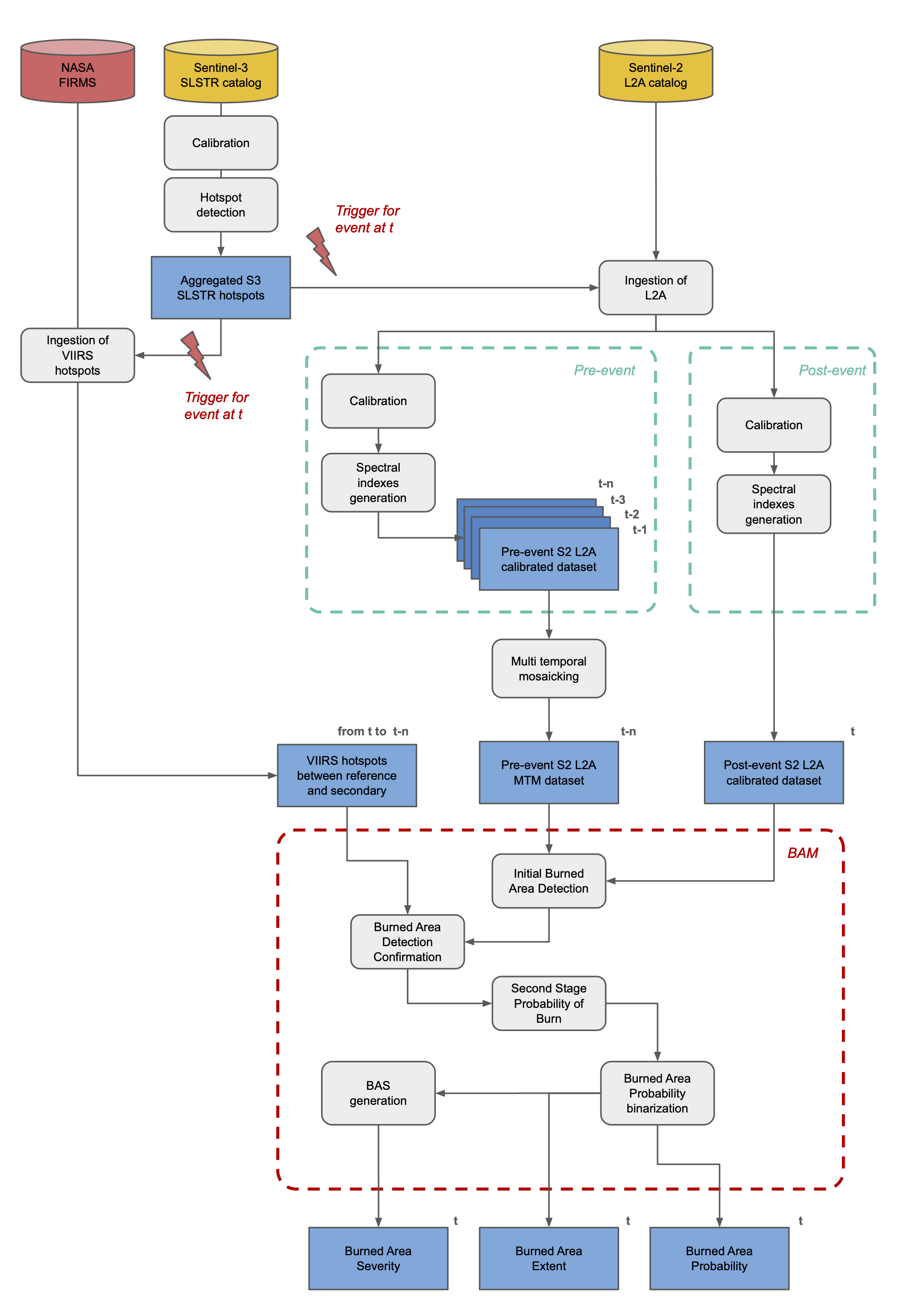
A continuación se detalla cada paso de la cadena descrita en el flujo de trabajo BAM.
Calibración del Sentinel-3
Este paso se refiere a la calibración de los datos de Sentinel-3 SLSTR RBT3. Los conjuntos de datos calibrados de Sentinel-3 SLSTR L1B RBT se derivan tanto para pasadas ascendentes como descendentes. Los activos VIS / SWIR se dan en una cuadrícula de 0,5 km, y las mediciones se expresan en reflectancia TOA. Para los canales IR térmico y de fuego a 1 km res las medidas radiométricas se expresan en temperaturas de brillo de la parte superior de la atmósfera (TOA). El conjunto de datos calibrado también incluye un activo de banda única de cobertura terrestre derivado del conjunto de datos de cobertura terrestre CCI 20204 de la ESA. Puede encontrar más información sobre la calibración de los datos de Sentinel-3 SLSTR L1B aquí.
Con respecto a la visualización de estos datos EO en el mapa, encuentre aquí más información sobre la capa derivada de los datos calibrados de Sentinel-3 SLSTR RBT.
Nota
En la configuración actual (véanse los valores por defecto de los parámetros del servicio BAM en la Tabla 1) se están considerando tanto las adquisiciones de Sentinel-3 SLSTR en pasada ascendente (nocturna) como descendente (diurna)
Agregación de puntos calientes en Sentinel-3
En este paso, el servicio obtiene puntos calientes agregados a partir de los datos calibrados de Sentinel-3 SLSTR L1B.
Los puntos calientes se derivan de conjuntos de datos calibrados de Sentinel-3 SLSTR L1B RBT adquiridos en pasadas ascendentes (nocturnas). El algoritmo devuelve la detección de incendios activos de toda la escena como una máscara binaria (No-Fire=0, Hotspot=1) a 1 km de resolución. El procesador de detección de puntos calientes de Sentinel-3 SLSTR implementa un sencillo algoritmo para identificar los píxeles que contienen uno o más fuegos activos en el momento del sobrepaso del satélite. El algoritmo evalúa tanto valores absolutos de temperatura de brillo a 3.74μm como incrementos significativos de estos valores en comparación con el observado a 10.85μm (Giglio et al., 2003)5.
En la primera etapa el procesador evalúa los píxeles a excluir de la detección de puntos calientes aplicando condiciones basadas en valores de temperatura de brillo, cobertura de nubes y datos de cobertura del suelo. Los píxeles de la banda F1 con una temperatura de brillo inferior a 265 K no se tienen en cuenta en las adquisiciones nocturnas de Sentinel-3 SLSTR. A continuación, se identifican los píxeles válidos tomando sólo los que no están nublados y en los que el conjunto de datos ESA CCI Land Cover 20204 no clasifica el terreno como: urbano, suelo desnudo, agua, nieve permanente y hielo. Dado que las bandas MIR de SLSTR son las más sensibles a la presencia de incendios de combustión activa (ESA OPT-MPC, 2023)3, el algoritmo identifica inicialmente píxeles muy brillantes en los datos del canal F1 que son los que contienen incendios de combustión activa debido a sus elevadas temperaturas de brillo. La prueba inicial considera solo píxeles de la banda F1 con una temperatura de brillo superior a 325 K (Kings College London, 2012)6.Más tarde, para eliminar el fondo cálido, solo se toman como zonas interactivas candidatas los píxeles que tienen un valor F1 – F2 superior a 18 K.
Después de la detección de puntos calientes, el procesador deriva clústeres de puntos calientes agregados utilizando los resultados obtenidos de los pases nocturnos de Sentinel-3 SLSTR. El algoritmo devuelve un elemento STAC con el recurso binario de banda única filtrado espacialmente derivado del punto de acceso uno mediante el algoritmo Tameve. También devuelve un vector de polígono para cada clúster de zonas interactivas agregadas derivadas del recurso filtrado. Dichos polígonos se dan en un solo archivo en formato GeoJSON.
En cuanto a la visualización de este producto en el mapa, encuentre aquí más información sobre la capa derivada del producto de puntos calientes de Sentinel-3.
Calibración Sentinel-2 y generación de índices espectrales
Esta parte de la cadena está dedicada a la creación de conjuntos de datos calibrados Sentinel-2 MSI L2A. Los activos VIS / SWIR se dan a resoluciones nativas (10 m, 20 m) y las mediciones se expresan en reflectancias TOA. El producto Scene CLassification (SCL) de sen2cor7 también se ofrece como un activo de banda única con una resolución espacial de 20 m. El recurso de vista general es una composición de color verdadero. Durante la ingesta de productos Sentinel-2 L2A, el producto SCL se recopila y se ofrece como activo de banda única en todos los conjuntos de datos calibrados de Sentinel-2 L2A. El Índice de Vegetación de Diferencia Normalizada (NDVI)8, el Índice de Combustión del Infrarrojo Medio (MIRBI) 9, y el índice de Relación Normalizada de Quemado 2 (NBR2) 10 se generan de manera sistemática como parte del flujo de trabajo de calibración óptica y se ofrecen como activos de banda única en todos los conjuntos de datos calibrados de Sentinel-2 L2A. Más información sobre la generación del índice espectral en el procesador de calibración óptica aquí.
Con respecto a la visualización de estos datos EO en el mapa, encuentre aquí más información sobre la capa derivada de los datos calibrados Sentinel-2 MSI L2A.
Mosaico multitemporal Sentinel-2
Este paso deriva un mosaico multitemporal a partir de múltiples conjuntos de datos calibrados Sentinel-2 MSI L2A adquiridos antes de un evento de incendio forestal en curso sobre un solo ID de baldosa de Sentinel-2 (por ejemplo, T10TFK). Esta imagen multiespectral artificial se deriva mediante un mosaico temporal basado en el valor más alto de NDVI entre una serie temporal. Un flujo de trabajo automatizado busca un número predefinido de imágenes Sentinel-2 L2A adquiridas antes del inicio del incendio forestal que tengan una cobertura de nubes inferior a un umbral determinado. Luego, se crea una pila de imágenes L2A de S2 adquiridas en diferentes momentos, y se extraen los valores de reflectancia de los píxeles más verdes de la pila multitemporal. Después, se crea el mosaico de la imagen para los activos de banda simple azul, verde, roja, nir, swir16, swir22 y SCL.
Con respecto a la visualización de estos datos EO en el mapa, encuentre aquí más información sobre la capa derivada del producto Mosaico Multitemporal.
Ingestión de puntos calientes VIIRS
Desde el servicio FIRMS de la NASA11 el servicio BAM ingiere los incendios activos en Tiempo Real (NRT) del satélite VIIRS S-NPP con una resolución de 375 m. Estos se recortan en la extensión de una baldosa de Sentinel-2 y se agregan temporalmente utilizando la revisión de 5 días de Sentinel-2A/B. En esta agregación, solo se toman los puntos calientes con valores de confianza nominal o alta (se excluyen los que tienen un nivel de confianza bajo). Finalmente, los archivos vectoriales de puntos calientes NRT de VIIRS S-NPP se dilatan con un diámetro de 1 km (Roteta, et al., 2011)1 y luego se rasterizan a un raster binario con la misma cuadrícula, extensión y resolución espacial que una imagen de Sentinel-2.
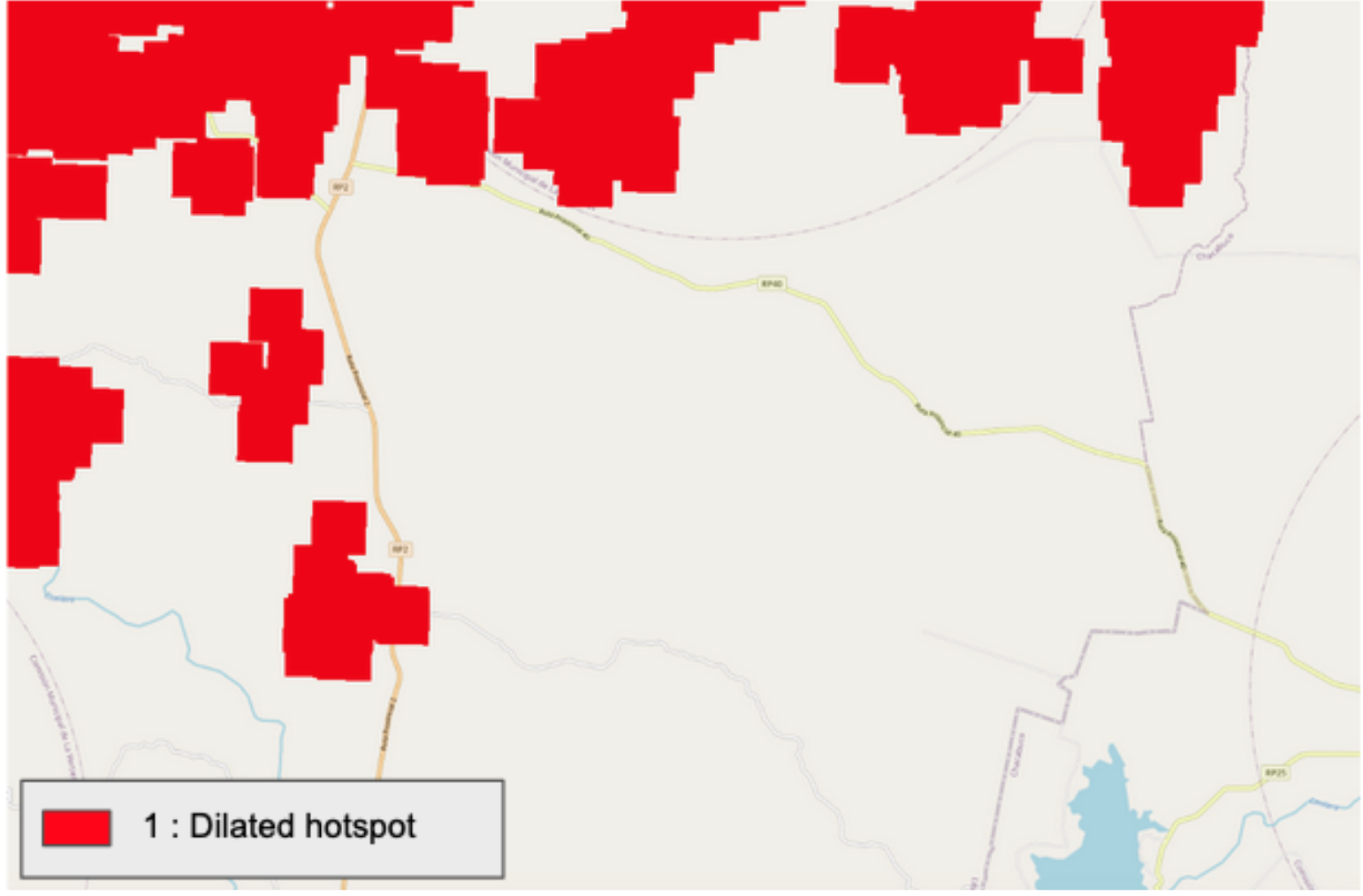
Con respecto a la visualización de este producto en el mapa, encuentre aquí más información sobre la capa derivada del producto puntos calientes VIIRS.
Detección inicial de área quemada
Este paso de la cadena comienza con el cálculo de la máscara de no quemables a partir de los activos SCL de Sentinel-2 antes y después del evento. Se define una máscara de no quemables para cada par de imágenes comparadas con el MTM y la imagen posterior al evento. Un píxel de una escena Sentinel-2 se define como quemable sólo si no está clasificado como 0 (Sin datos), 1 (Saturado o defectuoso), 6 (Agua), 8 (Nube de probabilidad media), 9 (Nube de probabilidad alta), 10 (Cirros finos) y 11 (Nieve) tanto en los activos SCL del MTM de referencia como en el actual conjunto de datos calibrado. Para las clases 8, 9 y 10 se aplica una dilatación de 5 píxeles para excluir más píxeles SCL a lo largo de los bordes de las nubes. Las nubes de baja probabilidad y las zonas oscuras (clase 2 de SCL) no se utilizan porque enmascararían una cantidad muy significativa de zonas quemadas.

Nota
El producto máscara de no quemables no está disponible para su visualización en la GUI.
Tras el cálculo de la Máscara Quemable y el enmascaramiento de los activos VIS/SWIR de los conjuntos de datos MTM y posteriores al evento, se obtiene el producto Área Quemada Inicial a partir del par de imágenes utilizando los criterios descritos en Roteta et al, 20211 que se enumeran en las 6 reglas siguientes.
El producto de Área Quemada Inicial muestra en rojo las zonas quemadas, en verde las zonas quemables y en gris las zonas en las que no se disponía de observaciones válidas para ejecutar el algoritmo. Los valores raster son: 0 - No observado, 1 - No quemado, 2 - Quemado. Puede encontrar más información sobre la capa derivada del producto Área quemada inicial aquí.
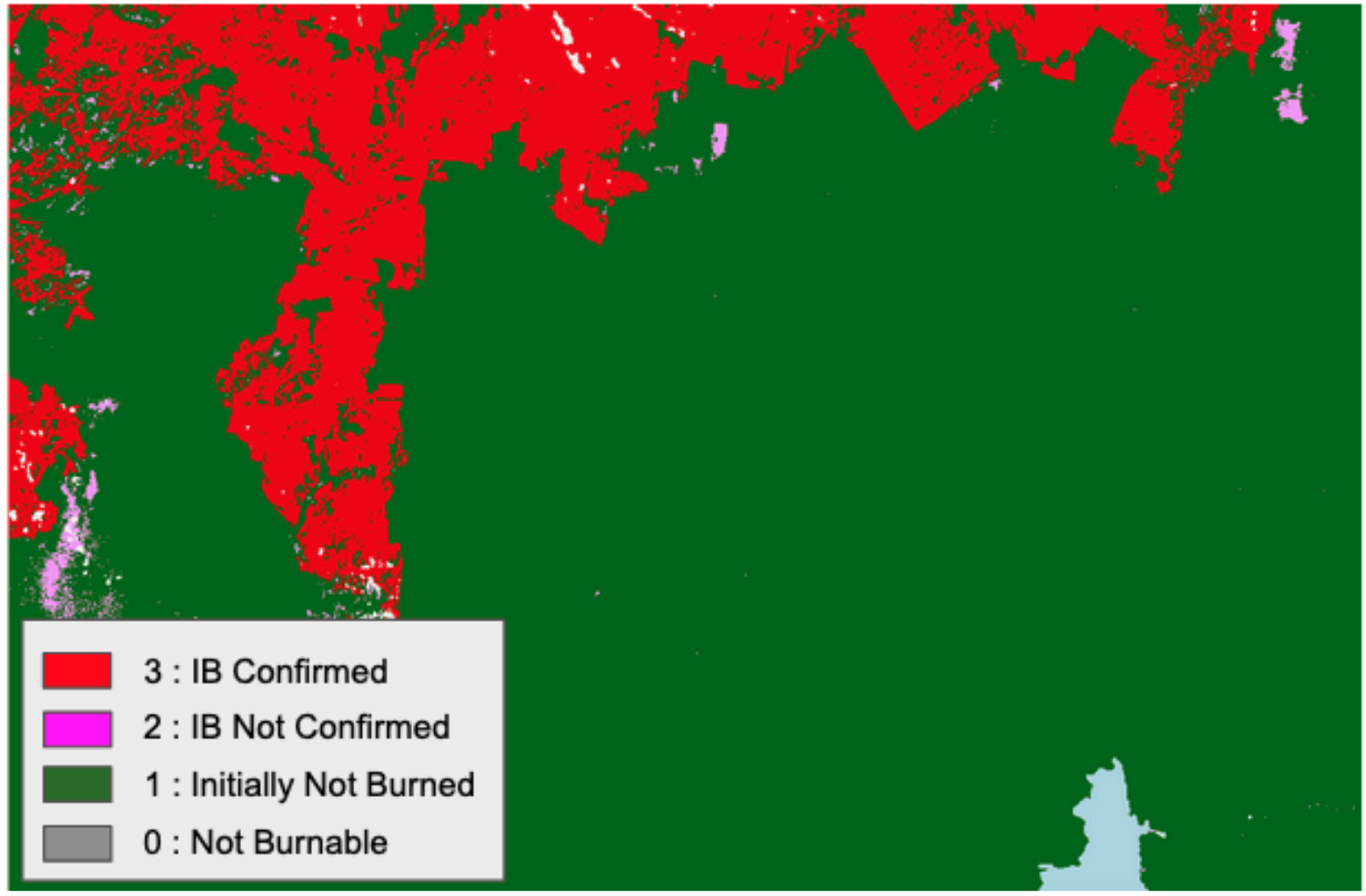
Confirmación de detección de área quemada
Este paso emplea el Área Quemada Inicial y los incendios activos VIIRS S-NPP rasterizados dilatados a 1km de resolución derivados de NASA FIRMS. Las áreas quemadas iniciales se cruzan luego con el ráster agregado de puntos de calor de VIIRS para confirmar que esas regiones están realmente quemadas y para obtener las áreas de Quemado Inicial Confirmado.
Advertencia
El producto Quemado Inicial Confirmado no está disponible para su visualización en la GUI.
Probabilidad de Quemado de la Segunda Etapa
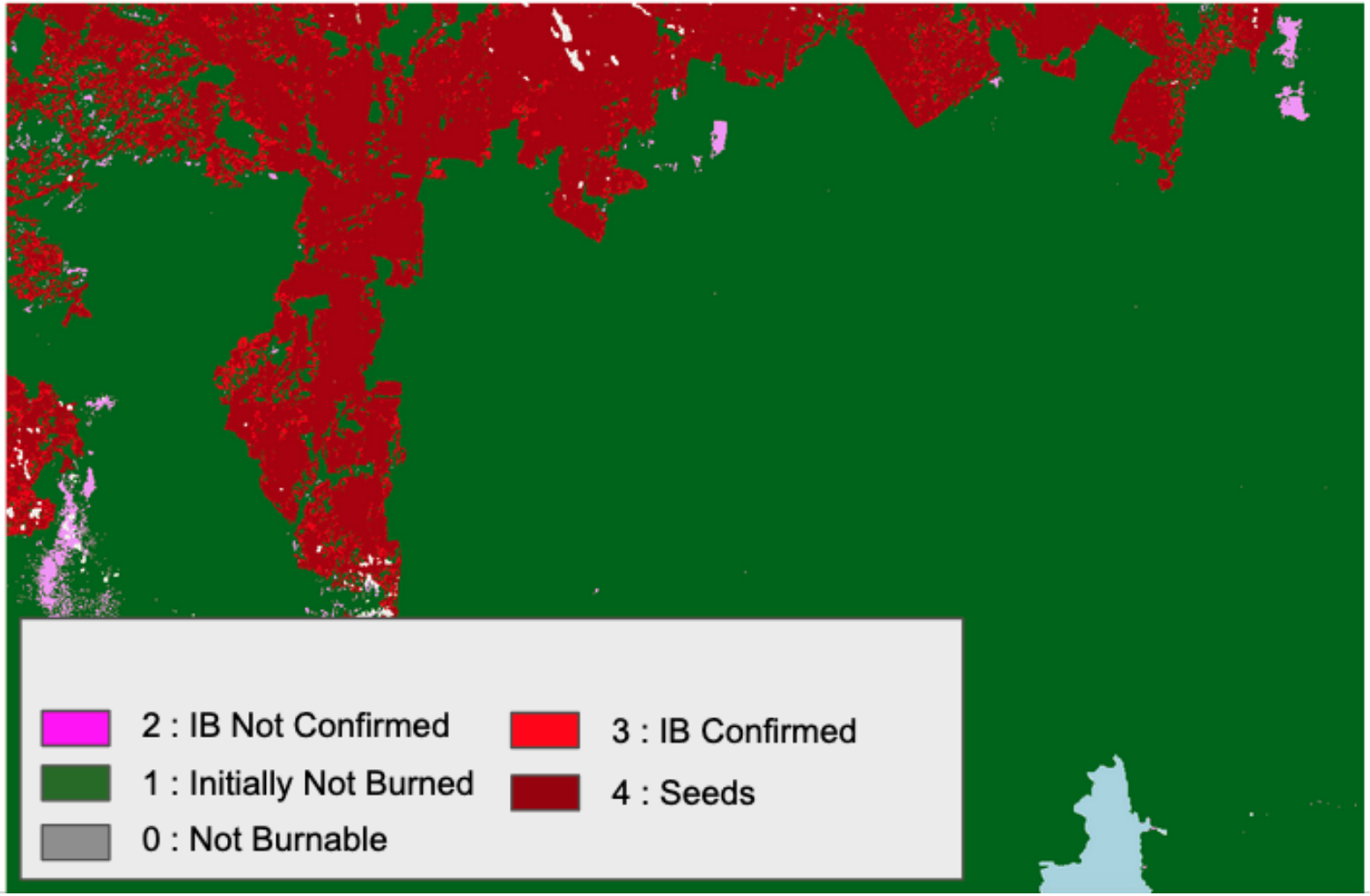
Después de la confirmación de las zonas quemadas, se aplica una estrategia de dos fases basada en las estadísticas de Área Quemada Inicial e Quemado Inicial Confirmado para equilibrar los errores de omisión y comisión (Bastarrika, et al., 2011)12. La primera fase consiste en la identificación de semillas quemadas (burned seeds), y posteriormente se emplea la Probabilidad de Quemado de la Segunda Etapa (Second Stage Probability of Burn, SEPB) para derivar el producto final. En este paso de la cadena, las semillas quemadas se calculan utilizando estadísticas básicas derivadas de las regiones de Quemado Inicial Confirmado.
Advertencia
El producto de semillas quemadas no está disponible para su visualización en la GUI.
Como se describe en Roteta et al. 20211: se emplea el percentil 5 para las variables cuyos valores en áreas quemadas son mayores que en áreas no quemadas, y el percentil 95 para el caso opuesto. Este enfoque se basa en dos variables: la diferencia multitemporal de MIRBI y NBR2, donde se calcula una función de membresía sigmoidea basada en Área Quemada Inicial e Quemado Inicial Confirmado. La multiplicación de ambas funciones de probabilidad, denominada SEPB, se utiliza para derivar la Probabilidad de Área Quemada. Para más información, consulte Roteta et al. 2021 1.
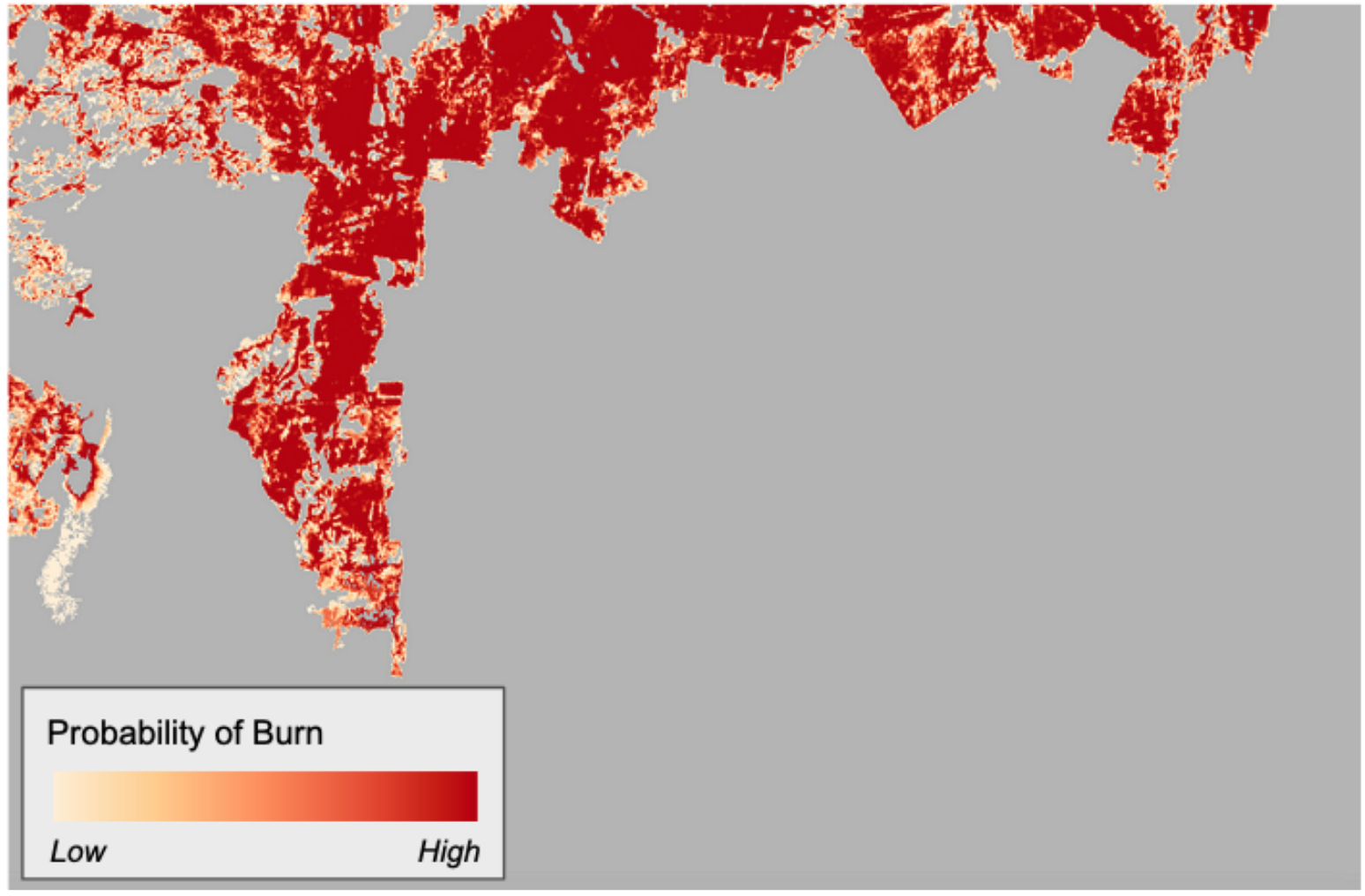
El producto Probabilidad de Quemado se muestra en la interfaz de usuario utilizando un mapa de gradiente de color verde a rojo aplicado a sus valores porcentuales. Puede encontrar más información sobre la capa derivada del producto Probabilidad de Quemado aquí.
Nota
La Probabilidad de Quemado proporciona un nivel de confianza alcanzado por la cartografía del área quemada (los píxeles que tienen un valor de Probabilidad de Área Quemada de moderado a alto tienen más probabilidades de estar realmente quemados).
Binarización de la probabilidad de área quemada
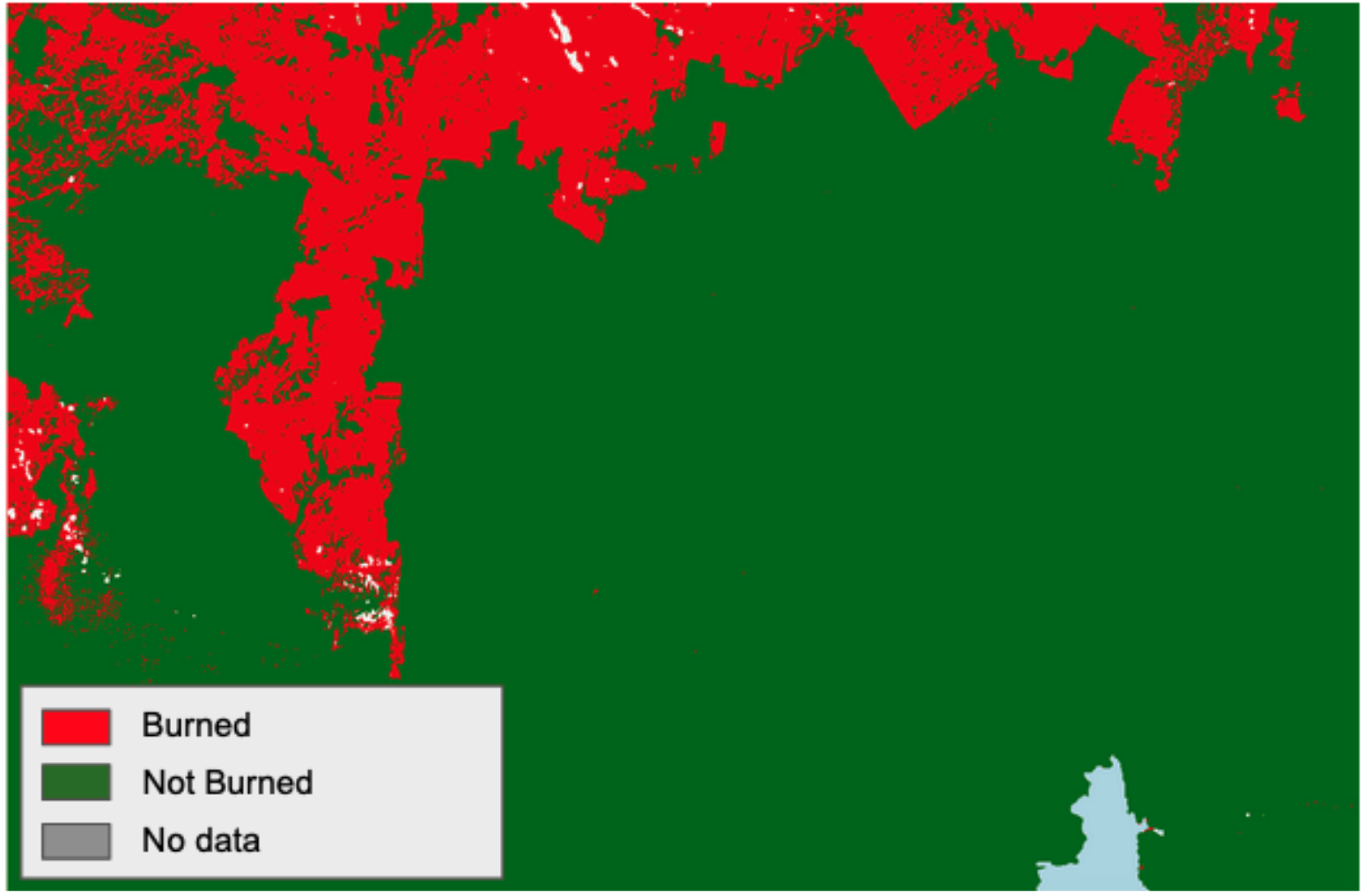
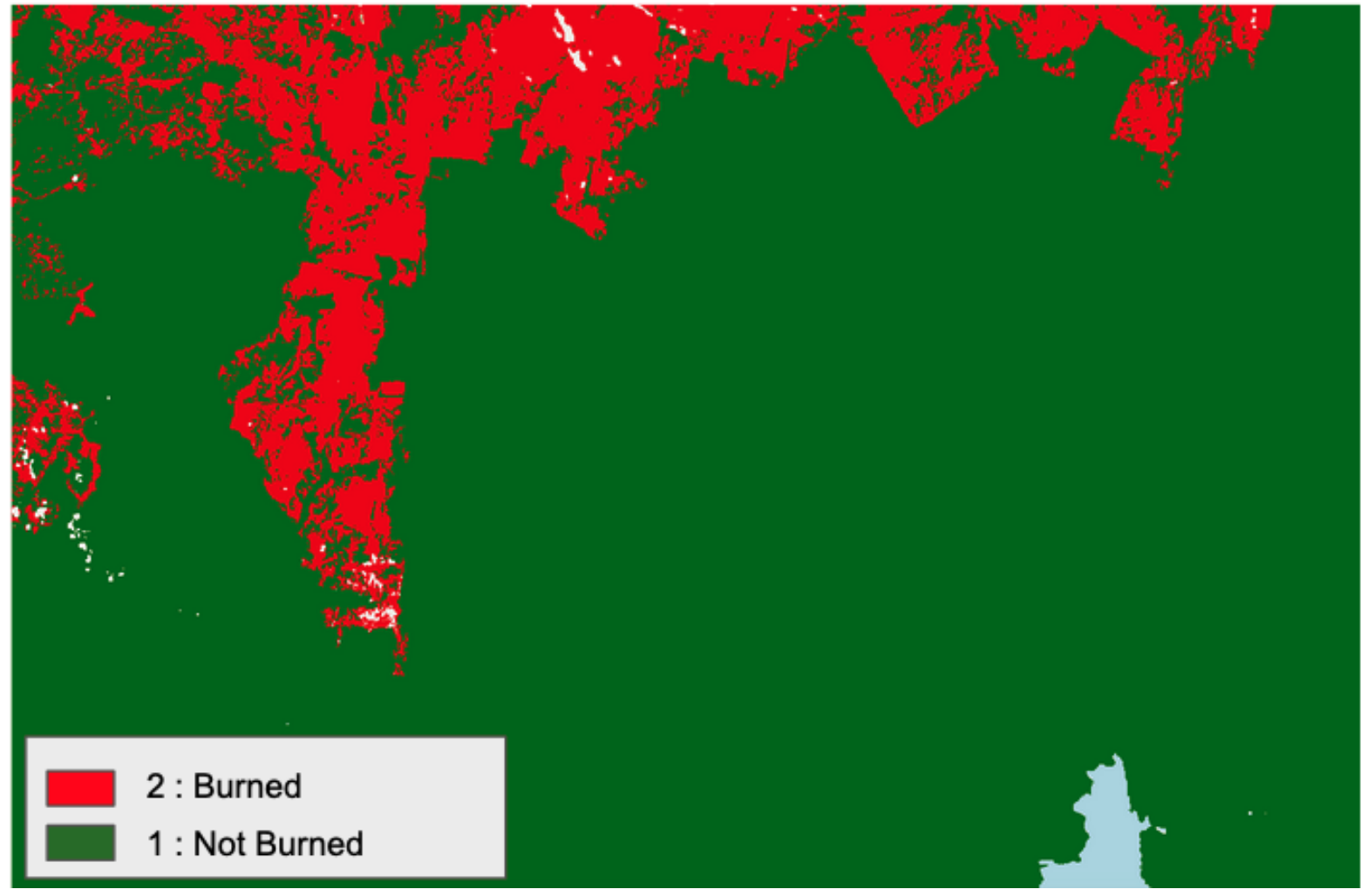
El producto final se deriva de la binarización de la Probabilidad de Quemado y proporciona la Extensión del Área Quemada. Los píxeles que tienen una Probabilidad de Quemado superior al 50% se mapean como quemados en el producto Extensión del Área Quemada.
El servicio BAM genera dos tipos de productos de extensión de superficie quemada:
-
el producto Extensión Actual del Área Quemada,
-
y el producto Extensión Total del Área Quemada.
El primer producto representa la Extensión del Área Quemada a 10 m de resolución derivada de los datos actuales calibrados Sentinel-2 L2A posteriores al evento. El segundo producto es el resultado de la agregación temporal de la Extensión Actual del Área Quemada con todas las anteriores derivadas por el algoritmo BAM obtenidas desde el inicio del seguimiento del incendio forestal. Ambos se generan en cada pasada de los datos de Sentinel-2 sobre el mosaico de seguimiento y se dan con una resolución de 10m.
Al igual que para el Área Quemada Inicial, el producto Extensión del Área Quemada muestra en rojo las áreas quemadas, en verde las áreas quemables y en gris donde no se disponía de observaciones válidas para ejecutar el algoritmo. Los valores raster son: 0 - No observado, 1 - No quemado, 2 - Quemado.
Puede encontrar más información sobre la capa derivada del producto Área quemada actual aquí.
Más información sobre la capa derivada del producto Área quemada total aquí.
Generación de Severidad del Área Quemada
Este paso calcula la Severidad del Área Quemada (Burned Area Severity, BAS) sobre los píxeles clasificados como quemados en el producto de Extensión del Área Quemada. El producto BAS consiste en un ráster con un gradiente de color basado en los valores de RBR. La severidad del quemado describe cómo la intensidad del fuego afecta el funcionamiento del ecosistema en el área quemada. Los efectos observados a menudo varían dentro del área y entre diferentes ecosistemas (Keeley, 2009) 13. La severidad del quemado también puede describirse como el grado en que un área ha sido alterada o interrumpida por el fuego 14. La metodología de Análisis de Severidad del Área Quemada integrada en este servicio se basa en el índice de índice de Relación Normalizada de Quemado (Normalized Burn Ratio, NBR) (Key and Benson, 2006) 15,
el delta de la Relación Normalizada de Quemado (delta Normalized Burn Ratio, dNBR) de Miller and Thode, 201416,
y la Relación Normalizada de Quemado Relativizada (Relativized Burn Ratio, RBR) de Parks et al., 20142.
De forma similar a la Extensión del Área Quemada, el servicio BAM obtiene dos tipos de productos de Severidad del Área Quemada:
-
el producto Severidad Actual del Área Quemada,
-
y el producto Severidad Total del Área Quemada.
El primer producto representa la severidad del área quemada a una resolución de 10m derivada de los datos actuales calibrados después del evento Sentinel-2 L2A. El segundo producto es el resultado de la agregación temporal de la Severidad del Área Quemada Actual con todas las anteriores derivadas por el algoritmo BAM obtenidas desde el inicio de la monitorización del incendio forestal. Ambos se generan en cada pasada de los datos de Sentinel-2 sobre el mosaico de seguimiento y se dan con una resolución de 10m.
El producto de severidad del área quemada consiste en un gradiente de color de amarillo a rojo basado en valores de RBR superiores a 0,3. Los colores amarillos representan una severidad de área quemada baja. Los colores amarillos representan valores bajos de severidad del área quemada, mientras que los rojos representan valores altos.
Más información sobre la capa derivada del producto Severidad Actual del Área Quemada aquí.
Más información sobre la capa derivada del producto Severidad Total del Área Quemada aquí.
Advertencia
En el servicio BAM el enmascaramiento de agua y nubes se basa en las clases relacionadas contenidas en el producto SCL del producto Sentinel-2 L2A.
Input
El servicio BAM requiere como entrada:
-
Datos Sentinel-3 SLSTR L1 RBT: todas las adquisiciones diurnas y nocturnas disponibles adquiridas sobre el Área de Interés (AOI).
-
Datos Sentinel-2 MSI L2A: una serie temporal de adquisiciones Sentinel-2 L2A ingeridas adquiridas sobre clústeres significativos de puntos calientes antes y después del evento desde t hasta t-n, donde “t” es el tiempo de observación de la última adquisición disponible de Sentinel-2 sobre un área y “n” es el número de días de distancia desde la imagen pre-evento de referencia más antigua (por ejemplo, n=15 si la imagen pre-evento más antigua se adquirió 15 días antes de la imagen del evento).
-
Puntos calientes VIIRS S-NPP NRT: todos los puntos calientes VIIRS detectados sobre el área de cada imagen Sentinel-2 ingerida obtenida del servicio NASA FIRMS bajo la colección en Tiempo Real de VIIRS Suomi-NPP.
Parametros
El servicio BAM requiere una cantidad especificada de parámetros obligatorios. La Tabla 1 describe estos parámetros. Estos no son definidos por el usuario a través de la interfaz gráfica (GUI), sino que pueden ser definidos por el operador del servicio dentro de un archivo de configuración antes de activar el flujo de trabajo del servicio BAM.
| Parametro | Descripción | Requerimiento | Por defecto |
|---|---|---|---|
| Fecha | Fecha a partir de la cual se debe activar el servicio. Puede ser una fecha presente, pasada o futura. La fecha insertada se utilizará como fecha de inicio para activar la ingestión automática de los datos Sentinel-3 SLSTR y, por lo tanto, todos los pasos siguientes de la cadena BAM. | SÍ | |
| Área de interés | Área de interés que debe cubrir el servicio en formato WKT (p. ej., extensión de toda Colombia). | SÍ | |
| Dirección de la órbita para la ingestión de S3 SLSTR | Dirección/es de la órbita para la adquisición de Sentinel-3 SLSTR que se deben ingerir. Las opciones son ASC (ascendente), DESC (descendente) o ALL (todas). | NO | ASC |
| Número de imágenes pre-evento para MTM | Número máximo de imágenes pre-evento utilizadas para la creación del mosaico multitemporal (MTM). | NO | 4 |
| Cobertura máxima de nubes en imágenes pre-evento | El porcentaje máximo de cobertura de nubes en las imágenes pre-evento válidas que se utilizarán para el análisis de la serie temporal multitemporal (MTM). | NO | 20 |
| Número mínimo de píxeles quemables | Número mínimo de píxeles quemables requeridos para SEPB. | NO | 12500 |
| Clases CLM para la máscara quemable | Empleo de la clase de cirros finos CLM en el cálculo de la máscara quemable. | NO | YES |
| Área mínima de IBAD considerada | Un umbral de tamaño en hectáreas que define el área mínima de los parches de área quemada considerados en la confirmación del área quemada. | NO | 30 |
| Filtrado espacial de puntos calientes S3 | Tamaño del umbral en píxeles que se utilizará en el filtrado espacial por tamizado de los puntos calientes de Sentinel-3 para obtener puntos calientes agregados (grupos significativos de puntos calientes) | NO | 3 |
| Filtrado espacial BAM | Tamaño del umbral en píxeles que se utilizará en el filtrado espacial por tamizado de los píxeles quemados en el BAM de salida para el cálculo de la extensión total en hectáreas. | NO | 30 |
| Umbral de binarización BAM | El valor del umbral como porcentaje que se utilizará al hacer la binarización del producto Probabilidad de Quemado y generar el mapa Extensión de Área Quemada. | NO | 50 |
| Duración de la ingestión de S2 para FRM | Cuánto tiempo se ingerirán los datos de Sentinel-2 para supervisar la recuperación de la vegetación. Este parámetro se expresa como el número de días tras el final del evento. | NO | 365 |
| Frecuencia de ingestión de S2 para FRM | Frecuencia en número de días que se utilizará cuando se ingieran datos de Sentinel-2 L2A sobre una baldosa una vez finalizado el incendio forestal. | NO | 15 |
| Comprobación del estado de los incendios forestales | Después de cuántos días sin un punto caliente detectado es necesario detener el flujo de trabajo BAM sobre un azulejo en llamas. | NO | 15 |
Output
El servicio BAM proporciona en salida los 13 productos enumerados en las secciones siguientes.
Principales productos BAM
-
PRODUCTO A - Puntos calientes agregados de Sentinel-3 SLSTR: agregación espacial de puntos calientes detectados a 1 km de resolución derivados de los datos calibrados de Sentinel-3 SLSTR RBT. Este producto proporciona una ráster binaria de banda única con los siguientes valores: 1=grupos de puntos calientes agregados, 0=otros. Formato: COG. Frecuencia: diaria
-
PRODUCTO B - Áreas con incendios: archivo vectorial que cartografía las partes del terreno en las que el servicio BAM está actualmente activo para vigilar un incendio. Las áreas contenidas en este producto corresponden a las huellas de las imágenes de Sentinel-2 que intersectan los puntos calientes agregados de Sentinel-3 SLSTR. Este producto puede utilizarse para identificar rápidamente las zonas con incendios activos para las que el BAM genera o generará productos de zonas quemadas. Frecuencia: 5 días.
-
PRODUCTO C - Extensión Total del Área Quemada: agregación temporal de la Extensión del Área Quemada desde el inicio del evento a una resolución de 10 m derivada de datos calibrados Sentinel-2 L2A anteriores y posteriores al evento. Las áreas quemadas se derivan utilizando una versión adaptada del algoritmo FireCCISFD20 (Roteta et al, 2021) empleando el Índice de Combustión del Infrarrojo Medio (MIRBI), y el índice de Relación Normalizada de Quemado 2 (NBR2) de los puntos calientes de Sentinel-2 y VIIRS S-NPP. Este producto es la síntesis de todos los productos de extensión de área quemada derivados por el algoritmo BAM desde el inicio de la vigilancia de incendios forestales. El producto Extensión Total del Área Quemada proporciona un raster de banda única con los siguientes valores: 0 - No observado, 1 - No quemado, 2 - Quemado. Frecuencia: 5 días.
-
PRODUCTO D -Severidad Total del Área Quemada: agregación temporal de la severidad del área quemada desde el inicio del suceso con una resolución de 10 m derivada de datos calibrados Sentinel-2 L2A anteriores y posteriores al suceso. Este producto es la síntesis de todos los productos de severidad del área quemada derivados por el algoritmo BAM desde el inicio del seguimiento del incendio forestal. El BAS se obtiene utilizando el índice RBR (Relativized Burn Ratio) y se calcula únicamente sobre los píxeles clasificados como quemados en el producto de área quemada total. Este producto proporciona un raster de banda única con valores de RBR superiores a 0,3. Frecuencia: 5 días.
Otros Productos BAM
-
PRODUCTO E - Puntos calientes VIIRS: puntos calientes detectados a 1 km de resolución obtenidos a partir de un compuesto diario de incendios activos en tiempo casi real (NRT) del satélite VIIRS S-NPP ofrecido por el servicio FIRMS de la NASA. Este producto proporciona un mapa que muestra los puntos calientes en rojo. Este producto proporciona un ráster binario de banda única con los siguientes valores: 1=punto caliente, 0=otro. Formato: COG. Frecuencia: diaria.
-
PRODUCTO F - Puntos calientes Sentinel-3 SLSTR: puntos calientes detectados a 1 km de resolución derivados de los datos calibrados de Sentinel-3 SLSTR RBT. El algoritmo de detección de incendios evalúa tanto los valores absolutos de la temperatura de brillo a 3,74μm como los incrementos significativos de estos valores en comparación con los observados a 10,85μm. Este producto proporciona un ráster binario de banda única con los siguientes valores: 1=punto caliente, 0=otro. Formato: COG. Frecuencia: diaria.
-
PRODUCTO G - Extensión Actual del Área Quemada: extensión del área quemada a 10 m de resolución derivada de los datos calibrados de Sentinel-2 L2A antes y después del evento. Las áreas quemadas se derivan utilizando una versión adaptada del algoritmo FireCCISFD20 (Roteta et al, 2021) empleando el Índice de Combustión del Infrarrojo Medio (MIRBI), y el índice de Relación Normalizada de Quemado 2 (NBR2) de Sentinel-2 y puntos calientes VIIRS S-NPP. El producto Extensión Actual del Área Quemada proporciona un ráster binario de banda única con los siguientes valores: 0 - No observado, 1 - No quemado, 2 - Quemado. Formato: COG. Frecuencia: 5 días.
-
PRODUCTO H - Severidad actual del área quemada: Severidad del Área Quemada (BAS) a 10 m de resolución derivada de los datos calibrados de Sentinel-2 L2A antes y después del evento. La BAS se obtiene utilizando el índice RBR (Relativized Burn Ratio) y se calcula sólo sobre los píxeles clasificados como quemados en el producto de área quemada actual. El mapa de severidad del área quemada emplea un gradiente de color de amarillo a rojo basado en valores de RBR superiores a 0,3. Formato: COG. Frecuencia: 5 días.
-
PRODUCTO I - Probabilidad de Quemado: probabilidad de quemado a 10 m de resolución derivada de los datos calibrados de Sentinel-2 L2A antes y después del evento. La probabilidad de área quemada se deriva utilizando una versión adaptada del algoritmo FireCCISFD20 (Roteta et al, 2021) empleando el Índice de Combustión del Infrarrojo Medio (MIRBI), y el índice de Relación Normalizada de Quemado (NBR2) de Sentinel-2 y puntos calientes VIIRS S-NPP. Este producto proporciona un nivel de confianza alcanzado por la cartografía del área quemada. Así, los píxeles que tienen una Probabilidad de Quemado superior al 50% son cartografiados como quemados en el producto Extensión Actual del Área Quemada. El producto Probabilidad de Quemado proporciona un raster de banda única con valores porcentuales del 0% (bajo) al 100% (alto). Formato: COG. Frecuencia: 5 días.
-
PRODUCTO J - Quemado Inicial: extensión de quemado inicial a partir de datos calibrados de Sentinel-2 L2A a 10m de resolución. Se trata de un producto intermedio derivado en la fase inicial del algoritmo FireCCISFD20 (Roteta et al, 2021) basado únicamente en el Índice de Combustión del Infrarrojo Medio (MIRBI) y en el índice de Relación Normalizada de Quemado 2 (NBR2). El producto quemado incial proporciona un raster de banda única con los siguientes valores: 0 - No observado, 1 - No quemado, 2 - Quemado. Formato: COG. Frecuencia: 5 días.
Productos de datos EO
-
PRODUCTO K - Sentinel-3 SLSTR L1B: radiancias TOA y temperatura de brillo a 500m y 1km de resolución derivadas de los datos calibrados RBT de Sentinel-3 SLSTR. Múltiples archivos raster de banda única, uno para cada CBN visualizado en la capa vista en el mapa. Format: COG. Frequency: daily.
-
PRODUCTO L - Sentinel-2 MSI L2A: Reflectancias BOA a 10 m de resolución a partir de datos calibrados de Sentinel-2 L2A adquiridos antes o después de un incendio forestal. Múltiples archivos raster de banda única, uno para cada CBN visualizado en la capa vista en el mapa. Format: COG. Frequency: 5 days.
-
PRODUCTO M - Sentinel-2 L2A mosaico multitemporal (MTM): Reflectancias BOA a 10 m de resolución de un mosaico de imágenes a 10 m de resolución derivadas de múltiples conjuntos de datos calibrados Sentinel-2 L2A adquiridos antes del incendio forestal. Este producto es el resultado de una reconstrucción artificial de una imagen anterior al incendio para mitigar los efectos de la nubosidad persistente. Múltiples archivos raster de banda única, uno por cada CBN visualizado en la capa vista en el mapa. Format: COG. Frequency: once per wildfire event over the S2 tile.
Proveedor del Servicio
El servicio es desarrollado por Terradue.
Volver a servicios de incendios
Bibliografía
-
ESA (2021), "FireCCISFD20 Algorithm Theoretical Basis Document (ATBD) – Sentinel-2 Sub-Saharan Africa", Version 1, Nov. 3, 2021. Disponible en: https://climate.esa.int. ↩↩↩↩↩
-
Parks S. A., Dillon G. K., Miller C. A. (2014) "A New Metric for Quantifying Burn Severity: The Relativized Burn Ratio" Remote Sens. 6, no. 3: 1827-1844. DOI: 10.3390/rs6031827 ↩↩
-
ESA OPT-MPC (2023), Sentinel-3-SLSTR-Land-Handbook, Doc. Ref: OMPC.ACR.HBK.002, Issue 1.3, April 2023. Disponible en: https://sentinel.esa.int/documents/247904/4598082/Sentinel-3-SLSTR-Land-Handbook.pdf ↩↩
-
ESA (2021), ESA CCI/C3S Global Land Cover product 2020 (v2.1.1) Disponible en: www.esa-landcover-cci.org. ↩↩
-
Giglio, Louis & Descloitres, Jacques & Justice, Christopher & Kaufman, Yoram. (2003). An Enhanced Contextual Fire Detection Algorithm for MODIS. Remote Sensing of Environment. DOI: 87. 273-282. DOI: 10.1016/S0034-4257(03)00184-6. ↩
-
Kings College London (2012), Sentinel-3 optical products and algorithm definition, SLSTR ATBD Fire Product, Doc. Ref: S3-L2-SD-03-T04-KCL-ATBD, Version: 3.2, October 2012. Available at: https://sentinels.copernicus.eu/documents/247904/0/SLSTR_Level-2_Fire_ATBD.pdf/77f452ea-ee65-4f84-a9cb-cc68d1c03c6f ↩
-
ESA Sentinel-2 L2A algorithm, Scene Classification specifications. Disponible en: https://sentiwiki.copernicus.eu. ↩
-
Rouse J., Haas R. H., Schell J. A., Deering D. (1973), “Monitoring vegetation systems in the great plains with ERTS”, NASA. Goddard Space Flight Center 3d ERTS-1 Symp., Vol. 1, Sect. A. Disponible en: https://ntrs.nasa.gov. ↩
-
Trigg, S.; Flasse, S., "An evaluation of different bi-spectral spaces for discriminating burned shrub savanna", Int. J. Remote Sens. 2001, 22, 2641–2647. DOI: 10.1080/01431160110053185. ↩
-
Storey E.A., Stow D.A., O’Leary J.F. (2016), "Assessing postfire recovery of chamise chaparral using multi-temporal spectral vegetation index trajectories derived from Landsat imagery". Remote Sens. Environ. 2016, 183, 53–64. DOI: 10.1016/j.rse.2016.05.018. ↩
-
NASA FIRMS, VIIRS Suomi NPP Fires and Thermal Anomalies Day and Night, 375m. Disponible en: https://firms.modaps.eosdis.nasa.gov. ↩
-
Bastarrika, A., Chuvieco, E., & Martin, M.P. (2011). Automatic Burned Land Mapping From MODIS Time Series Images: Assessment in Mediterranean Ecosystems. IEEE Transactions on Geoscience and Remote Sensing, 49, 3401-3413. ↩
-
Keeley, J. E. (2009), "Fire intensity, fire severity and burn severity: A brief review and suggested usage", International Journal of Wildland Fire, 18(1), 116–126. Disponible en: https://pubs.er.usgs.gov. ↩
-
Key, C. H. and Benson, N. C. (2006), “Landscape Assessment (LA): Sampling and Analysis Methods”, USDA Forest Service Gen Tech. Rep RMRS-GTR-164-CD. FIREMON Fire effects monitoring and inventory System. Disponible en: www.fs.usda.gov. ↩
-
Miller J. and Thode A. (2007), “Quantifying burn severity in a heterogeneous landscape with a relative version of the delta Normalized Burn Ratio (RdNBR)”, Remote Sensing of Environment, 109, 66-80. DOI: 10.1016/j.rse.2006.12.006. ↩