Especificaciones del servicio de Mapeo de Frecuencia de Inundaciones basado en SAR (SAR-FFM)
Descripción del servicio
El servicio Mapeo de Frecuencia de Inundaciones basado en SAR (SAR-FFM) bajo demanda aprovecha el mapeo multitemporal de la extensión de inundaciones para generar un mapa de frecuencia de inundación que ilustra los patrones de ocurrencia de inundaciones.
Proporciona un mapa de frecuencia de inundación de alta resolución a 20 m de resolución a partir de series de registros de inundaciones derivadas de imágenes Sentinel-1 con el algoritmo AUTOmatic Water Areas Detector (AUTOWADE)1,2,3. Este servicio se aplica en una ventana temporal definida por el usuario para generar una serie temporal de mapas de extensión de inundaciones y un mapa de frecuencia de inundaciones, que informa la proporción de tiempo en que un píxel determinado ha estado inundado.
Los datos de Observación de la Tierra (EO) de las colecciones Sentinel-1 GRD se ingieren y calibran de manera automatizada durante todo el período de tiempo definido por el usuario, normalmente tres años de datos extraídos del archivo de Sentinel-1 (GRD). Para cada par de conjuntos de datos calibrados de Sentinel-1, el servicio emplea automáticamente el algoritmo AUTOWADE de CIMA para Sentinel-1 a fin de generar mapas individuales de delimitación de aguas mediante un enfoque automatizado de detección de cambios. La pila completa de estos mapas de inundaciones para el intervalo seleccionado se analiza posteriormente para calcular la frecuencia de inundaciones, es decir, la proporción de veces que cada píxel se inundó en relación con el número de observaciones.
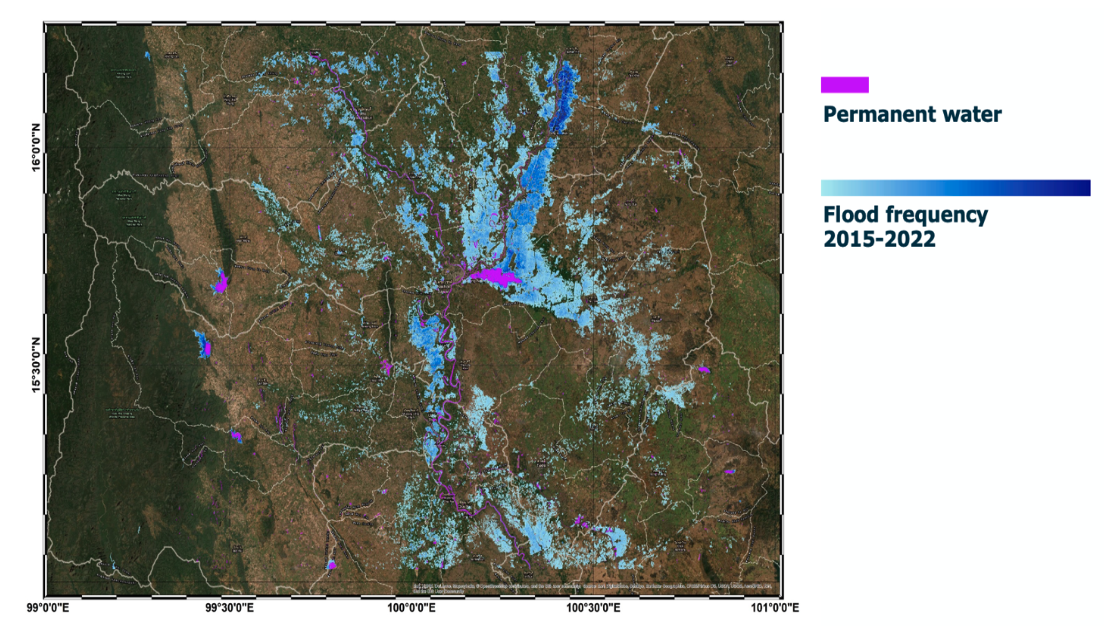
El resultado final es un ráster de frecuencia de inundación, donde cada píxel tiene un valor entre 0 y 100, que indica como porcentaje cuántas veces se inundó del número total de veces que se observó (ver la Figura 1 como ejemplo).
Flujo de trabajo
El esquema mostrado en la Figura 2 en esta sección describe el flujo de trabajo de alto nivel del servicio SAR-FFM.
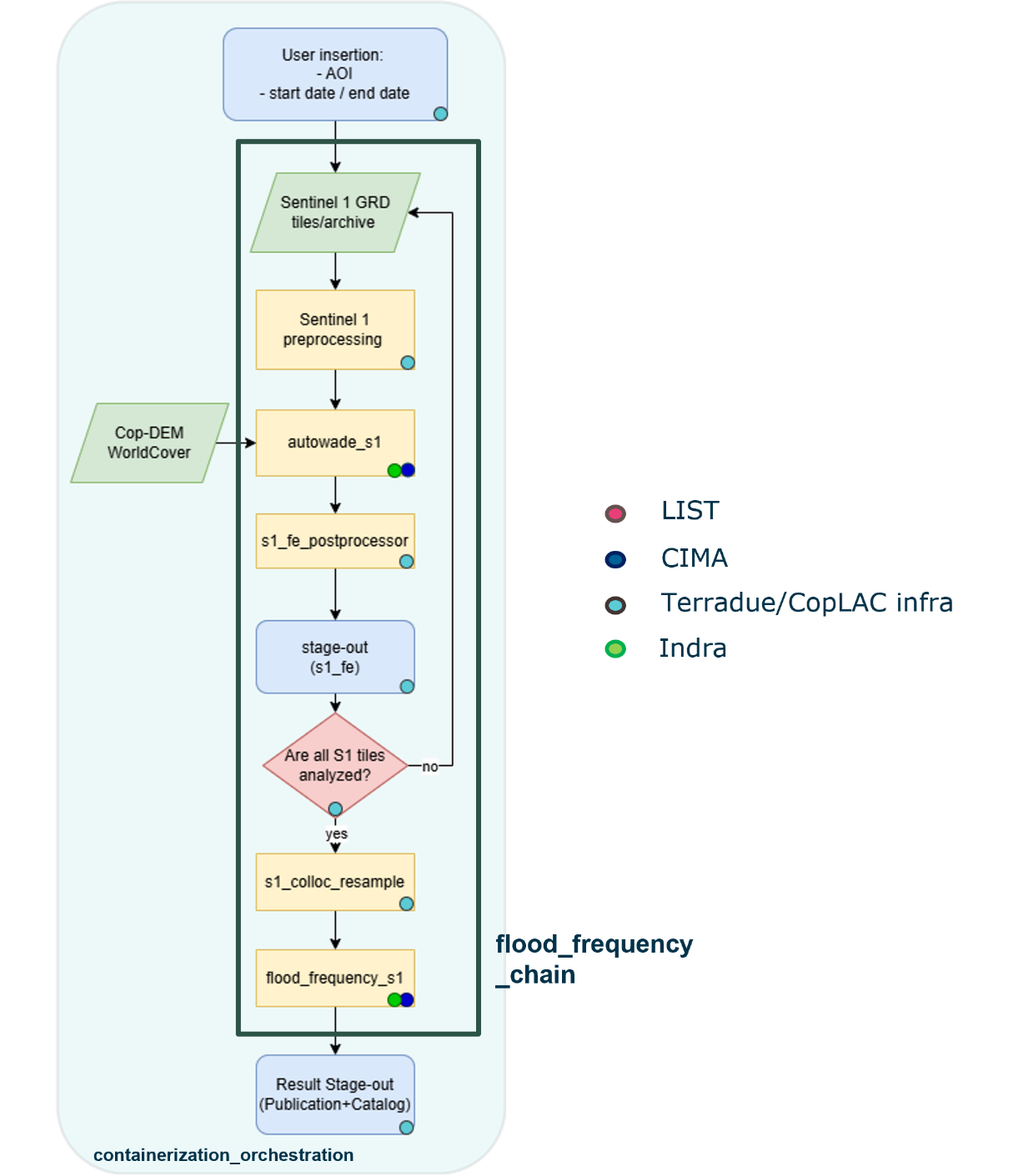
El flujo de trabajo requiere como entrada el Área de Interés (AOI) y las fechas de inicio y fin, que definen el intervalo de tiempo en el que se calculará la frecuencia. Posteriormente, el servicio inicia el mapeo automático de inundaciones en el catálogo de imágenes disponibles de la misión Sentinel-1 en ese intervalo, apoyado por datos auxiliares como el CopDEM4 y el WorldCover de la ESA5. Los mapas de inundaciones derivados de Sentinel-1 se ingresan luego en la herramienta de cálculo de frecuencia de inundación. Los mapas de frecuencia de inundación derivados de la cadena de procesamiento de Sentinel-1 constituyen el producto de salida.
A continuación, se detallan los pasos de la cadena descrita en el flujo de trabajo del servicio SAR-FFM.
Preprocesamiento Sentinel-1 GRD
Este módulo incluye un flujo de trabajo de preprocesamiento estándar para obtener imágenes de intensidad sigma nought calibradas, corregidas y proyectadas de Sentinel-1 en dB, utilizando como entrada productos Sentinel-1 GRD. El módulo de preprocesamiento incluye el emparejamiento de imágenes previas y posteriores por órbita para ser ingeridas por el algoritmo autowade_s1.
AUTOWADE para S1
El algoritmo AUTOWADE, desarrollado por CIMA, está diseñado para procesar datos Sentinel-1 (autowade_s1). La metodología tiene como objetivo producir mapas que delimiten tanto el agua permanente como el agua de inundación utilizando un enfoque de detección de cambios entre imágenes previas y posteriores al evento adquiridas en la misma geometría de órbita.
Primero, ciertas áreas de la imagen Sentinel-1 GRD preprocesada son excluidas del análisis, incluidas las regiones empinadas (basadas en datos de pendiente de Cop-DEM) y las áreas urbanas (basadas en WorldCover). Los cuerpos de agua permanentes se identifican utilizando un enfoque de “Buffer-from-Edge”. En este proceso, se aplica un algoritmo de agrupamiento no supervisado a la imagen co-polarizada VV para segmentar grupos de píxeles similares. Se asume que la clase con la mediana más baja representa los píxeles de agua.
El Área de Agua Dinámica Continua derivada se compara luego con la capa de agua permanente de referencia de WorldCover. La intersección entre ambos conjuntos de datos se somete a una detección de bordes, seguida de una operación de amortiguamiento (buffering) para obtener una distribución bimodal de píxeles de agua y no agua. Una vez lograda esta distribución, se aplica un método de umbral automático.
Para refinar la clasificación del agua permanente, se emplea un enfoque de crecimiento de región para asegurar que todos los píxeles de agua vecinos sean incluidos. La misma estrategia se utiliza para clasificar el agua de inundación, pero en este caso, el método se aplica a la diferencia entre las adquisiciones posteriores al evento y la imagen previa más reciente del mismo conjunto orbital.
Combinación y posprocesamiento S1
El paso 's1_merge_postpr' procesa la salida de autowade_s1 para abordar la eliminación de ruido, efectos de borde y otros problemas que pueden afectar el resultado final. Si el AOI dado intersecta múltiples mosaicos S1, el procesador une los mapas de inundación de diferentes mosaicos para generar un único mapa de inundación unificado.
Reproyección y remuestreo S1
El módulo 's1_coreg_resample' aplica reproyección y remuestreo a toda la pila de mapas de inundaciones derivados de Sentinel-1.
Frecuencia de Inundación
El procesador 'flood_frequency_s1' realiza un análisis basado en píxeles sobre la pila de mapas derivados de S1 para calcular los mapas de frecuencia de inundación. El análisis implica contar cuántas veces la superficie correspondiente a cada píxel estuvo inundada a través de los distintos mapas de inundación, cuantificando así la frecuencia de inundación para cada píxel.
Entrada
Las siguientes entradas son necesarias para ejecutar el servicio SAR-FFM:
-
Una lista de pares GRD de Sentinel-1 bajo la misma dirección de órbita, número de corte y trayectoria relativa adquiridos dentro de una fecha de inicio y finalización y que intersecan el AOI (estos son seleccionados y calibrados automáticamente por el servicio),
-
Una lista de mosaicos COP-DEM que intersecten el AOI (estos son ingeridos automáticamente por el servicio),
-
Una lista de mosaicos ESA World Cover 2021 que intersecten el AOI (estos son ingeridos automáticamente por el servicio).
Parámetros
El servicio SAR-FFM requiere un número específico de parámetros obligatorios. La Tabla 1 describe estos parámetros. Los parámetros opcionales no deben ser definidos por el usuario a través de la interfaz gráfica (GUI), pero pueden ser definidos por el operador del servicio dentro de un archivo de configuración antes del inicio del flujo de trabajo del servicio SAR-FFM.
| Parámetro | Descripción | Requerido | Valor por defecto |
|---|---|---|---|
| Área de Interés | Área de interés a ser cubierta por el servicio en WKT (por ejemplo, extensión de un distrito en Colombia) | SÍ | |
| Fecha de Inicio | Fecha de inicio del intervalo a considerar para el análisis, en formato AAAA-MM-DD. | SÍ | |
| Fecha de Inicio | Período de tiempo que se utilizará para buscar datos Sentinel-1 GRD antes y después del evento | SÍ |
Salida
El servicio SAR-FFM genera un Mapa de Frecuencia Empírica. Las especificaciones del producto son:
-
Definición: mapa de frecuencia de inundación, con cada píxel mostrando cuántas veces fue inundado del total de veces que fue observado. Rango válido [0-100]
-
Tipo y formato de datos: uint8, COG
-
Resolución espacial: 20 m.
-
Frecuencia de observaciones: 5-12 días.
-
Cobertura espacial: dependiendo de la disponibilidad de recursos, el área de interés será seleccionada junto con el usuario final.
-
Restricciones: disponibilidad de adquisiciones Sentinel-1 de buena calidad; limitación zonal o hidrológica (por ejemplo, inundaciones repentinas)
Créditos
El procesador AUTOWADE empleado en este servicio es desarrollado por CIMA Research Foundation.
Volver a Servicios de Inundaciones
References
-
Pulvirenti L., Squicciarino G., Cenci L., Ferraris L., Virelli M., Candela L., Puca S. Continuous flood monitoring using on-demand SAR data acquired with different geometries: Methodology and test on COSMO-SkyMed images, ISPRS Journal of Photogrammetry and Remote Sensing, Volume 225 (2025). DOI: 10.1016/j.isprsjprs.2025.04.036. ↩
-
Pulvirenti, L., Squicciarino, G., Fiori, E., Ferraris, L., & Puca, S. (2021). “A Tool for Pre-Operational Daily Mapping of Floods and Permanent Water Using Sentinel-1 Data”. Remote Sensing, 13(7), 1342. DOI: 10.3390/rs13071342. ↩
-
Pulvirenti, L., Squicciarino, G., & Fiori, E. (2020). A Method to Automatically Detect Changes in Multitemporal Spectral Indices: Application to Natural Disaster Damage Assessment. Remote Sensing, 12(17), 2681. DOI: 10.3390/rs12172681. ↩
-
Copernicus DEM – Global Digital Elevation Model - COP-DEM_GLO-30. DOI: 10.5270/ESA-c5d3d65. ↩
-
WorldCover 2021 v200 - Zanaga, D., Van De Kerchove, R., Daems, D., De Keersmaecker, W., Brockmann, C., Kirches, G., Wevers, J., Cartus, O., Santoro, M., Fritz, S., Lesiv, M., Herold, M., Tsendbazar, N.E., Xu, P., Ramoino, F., Arino, O., 2022. ESA WorldCover 10 m 2021 v200. DOI: 10.5281/zenodo.7254221. ↩